
Blog
Why frequency domain ship motion analysis instantly gives you a broad range of design feedback (and where it falls short)
The Mantis shrimp has some serious optical equipment not seen anywhere else in the animal kingdom. At first glance, not much sets them apart from similar-looking crustaceans like shrimp or crayfish that you might find across the ocean. But their eyes are a rare example of extreme sophistication: they have as many as 16 different types of photoreceptor cells in them. This leaves us humans humbled in comparison with only two kinds of photoreceptor cells – the rods and cones. So, what do all these specialized optical cells mean? The Mantis shrimp has an impressive ability to take in massive amounts of information from their surroundings. They can see a wide range of frequencies all at once – across the visible spectrum but well into the ultraviolet, too. They can perceive full depth perception no matter which way their eye stalks are facing – even if they are pointing in different directions, too. What’s more is that they have a neural configuration that helps them process all this information with minimal delay. They are set up to instantly process a broad range of data.
Instantly processing a broad range of data is helpful to survive and thrive in nature, but it is also crucial in the design and analysis process. More specifically, in the world of ship design, ship motion analysis can generate a massive amount of information. Yet by leveraging special mathematical techniques, all this information can be processed with minimal delay. Gauging the seakeeping performance of a specific vessel across a range of ocean conditions is most valuable in the early stages of ship design. But it has its limitations and pitfalls, too. In this article, we will cover how frequency domain seakeeping analysis works and instantly gives a broad range of design feedback.

What do we mean by a broad range of design feedback?
Seakeeping analysis is about computing ship motion across a wide range of sea state conditions. Ship motion – the linear surge, sway, heave, and rotational pitch, roll, yaw – depends on the details of the vessel itself: the hull form, the inertia values, center of gravity, appendages, and so on, but it also depends on conditions like forward speed, the sea state, and weather direction relative to the hull. On top of this, the intensity of motion differs depending on where you are on the vessel while it’s moving. For example, motions and accelerations are always more intense at the bow and stern when there’s severe pitch motion. A broad range of feedback means capturing the essence of ship motion at several locations around the vessel across many forward speeds and relative weather directions to the hull. It produces a lot of calculations and data, but fortunately, most seakeeping studies can be done almost instantly.
How does frequency domain seakeeping analysis work?
Most of the time, seakeeping analysis is computed in the frequency domain. Frequency domain analysis might sound a bit intimidating or exotic, but it is a mathematical technique that really all boils down to a crucial assumption made as part of the analysis process. In frequency domain analysis, everything is assumed to be sinusoidal: that is, all forces and resulting motions will be sinusoidal. This means the primary job of a seakeeping study in the frequency domain is to figure out just how big the amplitude and phase of the motion is relative to a sinusoidal ocean wave. A pre-calculation phase is required, and it can take time to resolve wave excitation forces on the hull and the resulting individual hull motions to each wave. But once this is completed, seakeeping analysis in any kind of sea state is very rapid.

How does frequency domain seakeeping analysis work so fast?
The assumption that everything is sinusoidal doesn’t limit all solutions to a pure sinusoidal wave only. Just like an irregular sea state is really a superposition of many different frequencies of sinusoidal ocean waves, the resulting ship motion is a superposition of different sinusoidal motions, too.
What’s so attractive about frequency domain analysis is that the ship motion calculation becomes a straightforward numerical multiplication on top of the ocean sea state spectrum of interest, which is done in fractions of a second. So, the calculation speed in processing the vast volume of data produced is a major advantage in frequency domain seakeeping analysis. But what about the downsides and other implications of assuming everything is sinusoidal?
You can’t handle transient effects
This is an implication from assuming all motions are sinusoidal – they are in a dynamic steady state. In other words, this means the results you’re looking at are the ship motion you would expect to see after things have settled into a groove. While a steady-state analysis is still helpful, it has a crucial implication for maneuvering analysis. Maneuvering analysis – evaluating what happens in different operations like the turning circle, zig zag test, and so on – is essentially all about transient analysis. This means there’s no way to use a frequency domain approach in evaluating maneuvering operations. In addition to the limitations of transient effects, another important consideration is what happens in extreme circumstances.
Accuracy deteriorates in extreme conditions
Another inherent limitation of any frequency domain analysis is that everything must be linear. But what does “linear” really mean?
In contrast, the word “nonlinear” is often very loaded and can mean a million different changes in the details of the analysis behind the scenes.
But the goal in this context is to highlight a few essential details. All frequency domain analysis in any kind of engineering calculation is inherently linear. You make this choice when you assume that all forces and solutions will be sinusoidal and proceed with solving the problem that way. But what does this mean for seakeeping problems?
Seakeeping analysis is most valid in conditions of mild to moderate ship motion
This limitation comes from underlying mathematical assumptions that the wetted hull area is constant. In other words, frequency domain analysis is valid when there are relatively small changes in the wetted hull area. This means that the calculated hydrodynamic physics is less accurate the more the wetted hull area changes. So when would there be large changes? When there’s excessive ship motion at either resonance or in extreme weather conditions. This limitation goes hand in hand with transient effects, too. In extreme conditions with large ship motions, you are more likely to get slamming effects or significant nonlinear changes in hydrodynamic forces like wave excitation and buoyancy, and there’s only so much that frequency domain seakeeping analysis can help you with.
Let’s look at an example
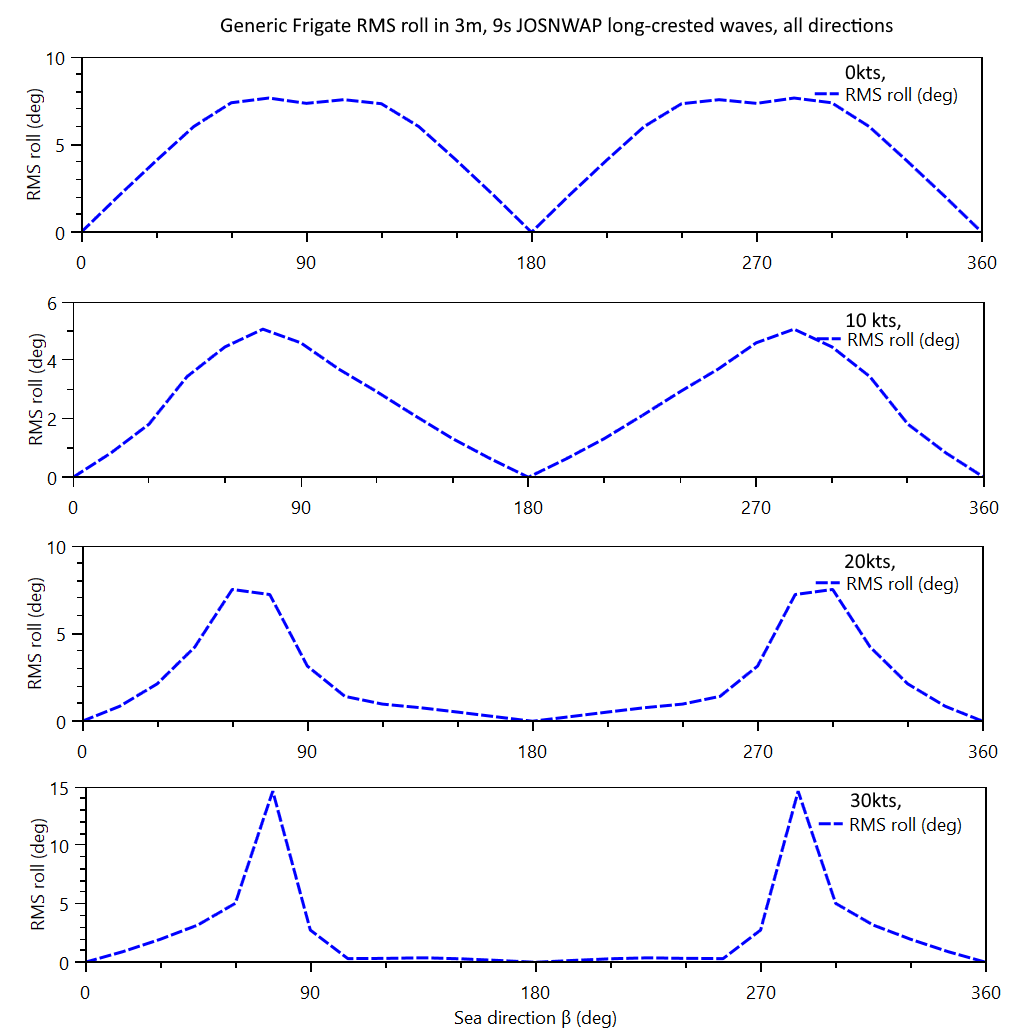
The ProteusDS ShipMo3D toolset uses calculates ship seakeeping motions using a frequency domain approach. To calculate the Generic Frigate ship motion response in a 3m, 9second JONSWAP sea state across 360 degrees of relative direction to the hull in 15 degree increments across 4 sets of forward speeds at 10 kt increments, for a total of 96 load cases took 3 seconds to compute on a consumer grade laptop. The motion of all degrees of freedom is resolved through this process, and a sample of the RMS roll motion is shown below.
Summary
We covered a lot on seakeeping analysis and it’s time to summarize. Seakeeping analysis is most often completed using a numerical approach called frequency domain analysis. This approach assumes everything is sinusoidal: all forces and resulting motions. But this has important implications about applicability to mild to moderate motions and a constant wetted hull. It can’t be used for transient analysis, which requires other techniques. But the upside is that calculating ship motion in different sea state conditions and forward speeds is almost instant.
It’s most useful at the early stage of concept design and gives feedback on the intensity of motion at any point on the hull through different forward speeds and relative weather direction to the hull. Like a Mantis Shrimp that can see things in different spectrums, you can use seakeeping analysis to give you the vision you need for a safer and better ship design.
Next Step
The ProteusDS ShipMo3D toolset uses frequency domain analysis techniques for seakeeping analysis. Read more about how this software can help you with seakeeping analysis here.