
Blog
How to improve resilience from the variety of buoy submergence
Ironclad beetles have a superpower: they can withstand a weight equal to 39,000 times their bodyweight. Like most insects, they are not big animals. Yet to put this into context, that is like a typical adult human holding 300 double decker buses. That’s a lot of transit on your back!
Yet this superpower isn’t about strength: they are not actually lifting up this amount of weight. Rather, it’s related to how much weight they can withstand. So how do they survive this kind of crushing load? The key lies in their shell.
Most beetles have a shell that hinges open to unfold wings for flight. The Ironclad beetle’s shell is different in that it is permanently fused shut. Sub-millimetre structural fibres interlock through their shell. The interleaving fibres then work together to form an incredibly strong shell that channels forces around their squishy, vulnerable bits to the ground. The result is that predators can’t crack their shell, and they’re almost impossible to crush from any outside force. They are fantastically resilient.
Resilience is crucial for something to survive a harsh environment. In the world of buoy and mooring systems, ocean waves and currents can make survival a challenge. In survival conditions, waves and currents can batter these floating systems with immense outside forces. Often, the way a buoy and mooring work together helps improve performance. Now, in a surface mooring, the first sign of something going wrong can be submergence of the buoy itself. Yet there’s a variety of ways a buoy can submerge. Understanding different kinds of submergence is the first step in making adjustments to the system design to compensate and make the system more resilient. In this article, we’re going to talk about:
- overtopping
- plunging
- sinking
First, we’re going to dig into overtopping.
Overtopping is a phenomenon in which waves crest over the top of a buoy
It creates a very short term submergence because usually the buoy pops up on the other side as the wave passes. What’s important to note is that this effect is transient. In other words, it’s not always about how much reserve buoyancy the float may have. It’s more about how readily the buoy can accelerate to follow waves.
The steeper the wave conditions are, the more rapidly the buoy needs to move to avoid an overtopping submergence
Steeper waves mean the buoy has to race up to the crest to avoid overtopping. If the mooring loads are high, a lot of reserve buoyancy might be needed to overcome those loads and accelerate the buoy quickly enough. So certainly if there isn’t enough reserve buoyancy, there may easily be overtopping. This can be an issue with smaller buoys in severe conditions, especially if there’s a lot of load from the mooring. Yet mooring interaction can be an important factor for both small and large buoys. In extreme conditions with huge waves, the dynamic mooring loads may restrain even the biggest buoys enough that they are overtopped by serious waves. This may be especially the case in shallow water conditions when moorings are stretched out from currents and waves, leaving little mooring compliance and producing huge resistance to buoy motion. This might then make the buoy more vulnerable to overtopping. Let’s look at a quick example.
Example 1: Moderate buoy in 50m water depth
We set up a 3m diameter 1500kg buoy in a 50m water depth scenario in ProteusDS. The wave conditions were 5m significant wave height with 9 second peak period. In a few cases with severe wave conditions, large waves overtopped the buoy for about 2 seconds. A screenshot showing an overtopping condition can be seen below.
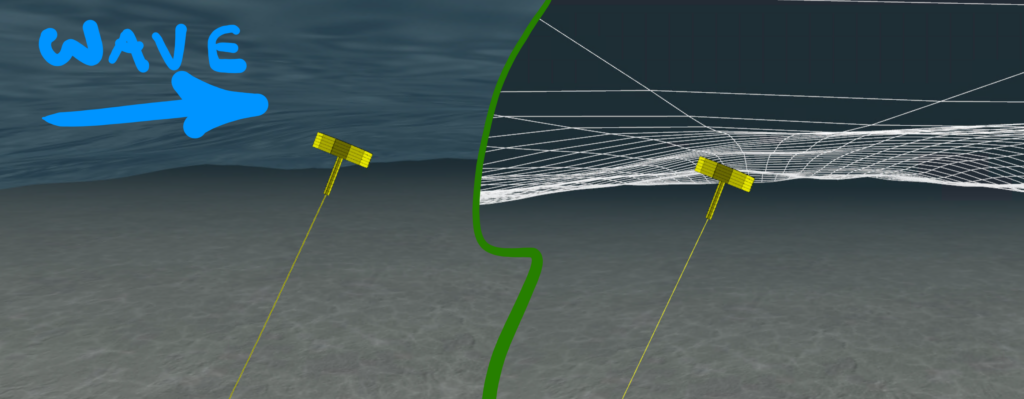
Overtopping submergence is very fast
It usually happens when a sizeable wave crest passes by. For the most part, more reserve buoyancy helps reduce the chances of this kind of problem. However, if the mooring loads can be reduced by introducing more compliance, this will also help. This overtopping submergence is very transient, but it’s not the only kind that can be extremely brief and dynamic. This brings us to the second point on plunging.
In extreme conditions, plunging submergence occurs when the momentum of the buoy takes it under the water
This kind of submergence happens in the most severe circumstances with extreme wave height and steepness. The start of a plunging submergence typically happens with a heavy buoy near the crest of a large wave. Just past the crest, the buoy starts accelerate and ride down the back of the wave. If the buoy is particularly heavy, it can pick up a lot of momentum. The speed in this momentum itself is not directly the problem. The problem is what happens to all this momentum as it reaches the trough of the wave.
All this momentum needs to go somewhere
Extreme waves often come in groups, so after the trough of this wave is usually another big one following up. So if the buoy has enough speed and momentum, it may plunge into the water already rising from the next steep wave. It’s a very transient effect and highly dependent on the buoy and extreme wave conditions. Sometimes this can be seen with boat-hull-shaped buoys. Their slender profile makes them more likely to arrow down the back of a steep wave and punch into the next following wave momentarily. Let’s look at a quick example of this.
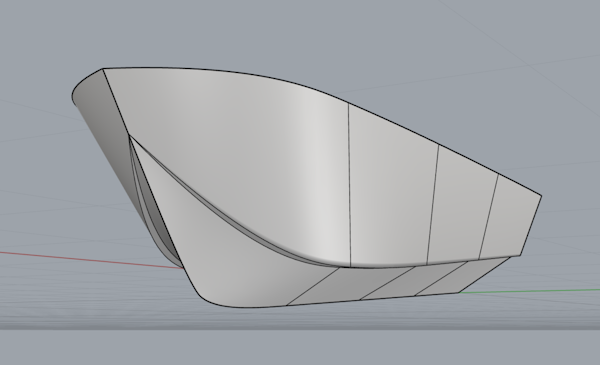
Example 2: Boat hull buoy in 50m water depth
We generated an approximate hull form for a boat hull shaped buoy based on the venerable NOMAD design. This hull was generated using Orca3D’s Hull Assistant in Rhino for use in a ProteusDS scenario. The NOMAD buoy was 5000kg, in 50m water depth, and tested in an extreme sea state of 10m significant wave height and 13 second peak period. The pictures below show a sample scenario where the bow of the buoy is submerged following a race down the back of a wave.
But is plunging submergence a real problem?
Not necessarily: there are parallels to the naval architecture world of ship design, when this is called green water on deck. Like ships in the ocean, boat-hull-shaped buoys can be made extremely tough and strong enough to withstand minor submergence. Still, it’s good to know it could be a possibility for proper structural design and to reduce the chances of damage to equipment on deck.
That said, because this plunging submergence is related to momentum, in some ways, smaller buoys with less mass and inertia may fare better and avoid this plunging effect. It’s because they don’t get as much momentum and can then accelerate faster up the next wave. But there are some cases of submergence when smaller buoys really struggle. And this brings us to the third point on sinking.
The most common type of submergence is sinking from too much mooring load
Both dynamic and static mooring reaction forces play a role in what happens to the buoy. But in this context, we’re talking about the average mean load from the mooring on the buoy from current drag. The drag load adds up on top of the static weight of the mooring. So if there isn’t a lot of reserve buoyancy, it means in certain current speeds, the buoy starts to go under. This is not necessarily a transient problem, because we are talking about a steady load on the buoy. So it can mean big trouble if your buoy is going under for long periods of time. Let’s look at a quick example of this.
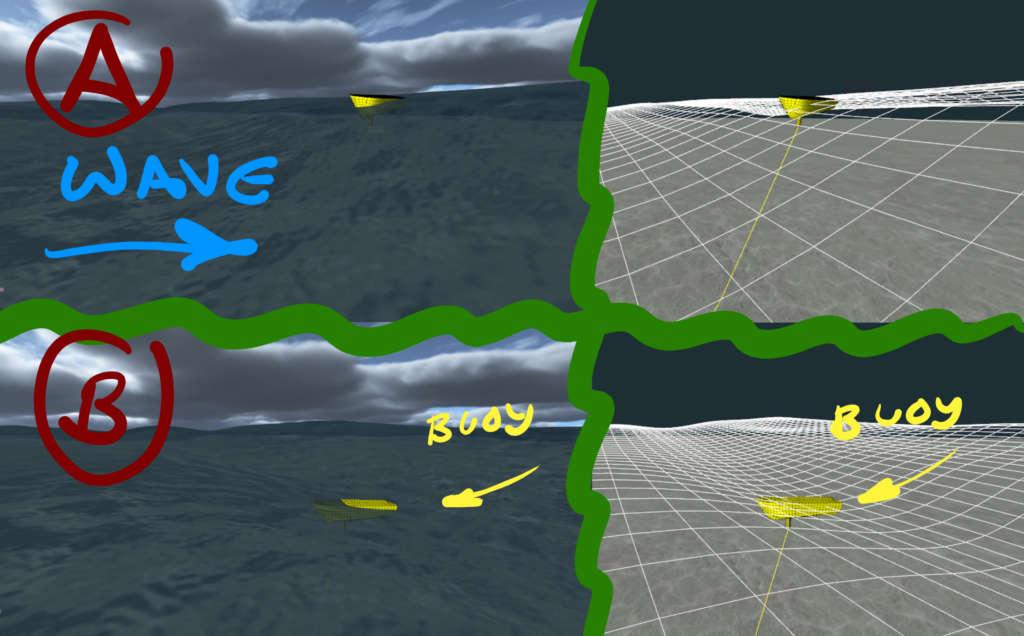
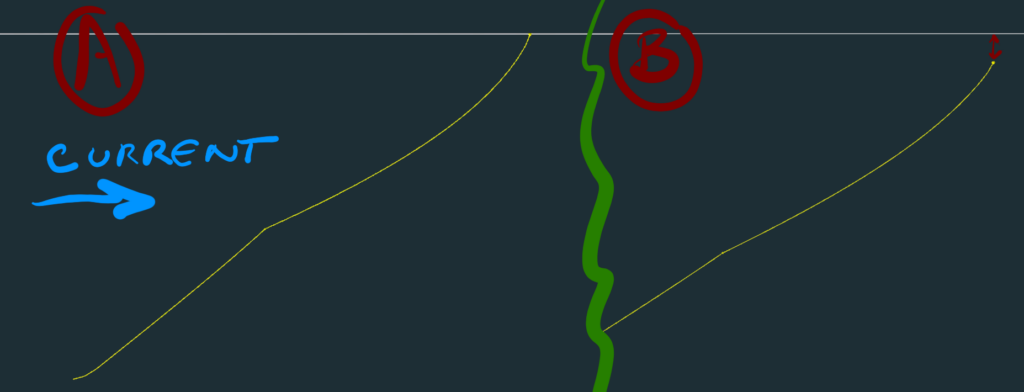
Example 3: Small buoy in 50m water depth
In this scenario, we set up a small generic buoy representative of a wave measurement float of 0.5m diameter and 50kg mass. The water depth was 50m with a linear shear current. A small midwater float was used to help reduce the loading on the wave measurement buoy. The picture below indicates the buoy is fine in a 2m/s shear current, but submerges in a 3m/s shear current.
So what can be done to help with submergence?
Often, the larger the buoy, the greater the reserve buoyancy, which can help resist the increasing mean mooring load from current drag. So you need a lot of careful analysis when looking at a mooring design for smaller buoys. You might need to find creative ways to reduce loads on the main buoy with midwater floats. Don’t underestimate the aggregate drag on the mooring either, which can add up to significant overwhelming forces in moderate water depths. A solution to this could be using a different, stronger rope material to take advantage of a smaller diameter that would reduce overall system drag. Reducing overall mooring drag or adding midwater floats can reduce mooring loads on the buoy, which in turn can reduce overtopping submergence.
Why not always use larger buoys to avoid overtopping or sinking?
It does help to reduce the chances of overtopping or sinking by using a bigger buoy with more reserve buoyancy. However, in the most extreme waves, when mooring loads get very dynamic, there may still be circumstances with overtopping. A larger buoy always means more mass and weight, too. If the buoy needs to track the water surface for wave measurement, heavier buoys will not follow it at lower wave heights and periods, causing data quality headaches. A larger, heavier buoy can also lead to much higher operational costs, such as a larger vessel with a bigger crane to handle it.
It’s summary time
We covered a few facets of buoy submergence, and it’s time to review. Buoys can submerge for a variety of reasons. Overtopping is when the waves move faster than the buoy and result in temporary transient submergence. Buoy inertia is a factor, but it may also be reserve buoyancy in combination with mean mooring loads. Plunging submergence is less common, but possible with much heavier buoys in extreme and steep wave conditions. The momentum the buoy gets from racing down the back of the wave can lead to transient submergence, especially when waves come in groups. Finally, the most common submergence is from steady loads on the mooring line from current drag. Most often overtopping and sinking can be addressed by improving mooring compliance to reduce reaction loads in steady or dynamic conditions. Increased buoy reserve buoyancy can help, too. Plunging submergence may not be a problem, but good to know whether it’s a possibility for buoy structural design and resilience of any exposed equipment. Regardless, carefully evaluating the system response in currents and waves is crucial to understand whether you have a system that is going to work and a buoy that is not going to get smooshed by the ocean – just as resistant to smooshing as the Ironclad beetle.
Next Step
Many mooring designers use ProteusDS to see what happens to a conceptual mooring design ahead of deployment. ProteusDS helps show what happens to a specific mooring in wind, waves, and currents. This way, mooring designers can get rapid feedback on things like buoy submergence from different combinations of mooring line length, materials, and float combinations. This feedback gives confidence that a design that will do what’s needed. Read more about the ProteusDS Oceanographic toolset and how it can help here.